BACK TO RESEARCH WITH IMPACT: FNR HIGHLIGHTS
As the FNR marks 25 years since its creation, we highlight 25 examples of FNR-supported research with impact.
Since arriving in Luxembourg in 2010, Holger Voos and his group have significantly advanced the research area of autonomous robots, advancing capabilities and knowledge in this rapidly evolving and interdisciplinary field.
“When I started in robotics research 25 years ago, most robots were experimental prototypes, drones were large remotely piloted aircrafts used exclusively for defence purposes, and autonomous vehicles were struggling in first autonomous driving competitions in the desert,” reflects Holger Voos, Full professor in Engineering Science at the University of Luxembourg’s SnT.
Massive advances over last decades
Much has happened over the last decades – research and technological advances in areas such as sensor technologies, mechatronics and drives, materials, electronics, as well as novel algorithms and artificial intelligence, have paved the way for the first generation of autonomous vehicles and robots that have become real products that anyone can buy and use.
Small robots, for example, are used in households for vacuum cleaning or cutting grass, autonomous taxis are being tested in real traffic. Drones are also widely available for anyone to buy and are increasingly used, for example, in commercial or recreational videography.

“In the first years after my start here in 2010, PhD students with a background in robotics or automation had difficulties to find a job in Luxembourgish industry after graduation. Fortunately, there are now considerably more job opportunities for these highly skilled graduates here in the country. Meanwhile, more companies in Luxembourg are working with different types of robots such as drones or legged robots, as well as on autonomous vehicle technology in the automotive or space industries. I am proud that my team and I have contributed with our research and projects to this encouraging development. ”Holger Voos Full professor in Engineering Science at the University of Luxembourg’s SnT
From self-driving cars to lawnmowers and beyond – vast applications
Now, we are witnessing autonomous vehicles and robots such as legged or humanoid robots, drones, self-driving cars, or autonomous spacecraft play an increasingly important role in many areas of application: transportation, construction, maintenance, cleaning, defense or even space exploration and utilisation.
Depending on advancements in human-robot interaction, they might also take on tasks as guides, in healthcare or as household aids, Voos explains. The application possibilities are vast, and more capable autonomous vehicles and robots – such as those Holger Voos and his group work on – will have a significant impact on the economy, as well as our working and private lives.
“The main research focus of my team and myself is on the automation of autonomous vehicles and robots,” Holger Voos explains.

“We investigate how such autonomous mobile systems can perceive their complex environments and create internal models of the situation in their surroundings, how they can plan their tasks and activities intelligently, and how they can control their motions and behaviours in order to act in a purposeful and safe way. ”Holger Voos
Highlight: Developing the research area of autonomous drones
When Holger Voos arrived in Luxembourg in 2010, autonomous robots was a research area barely present in the country. It has since grown significantly – much of it because of the work of Voos and his group – and since 2020 is part of Luxembourg’s National Research Priorities.
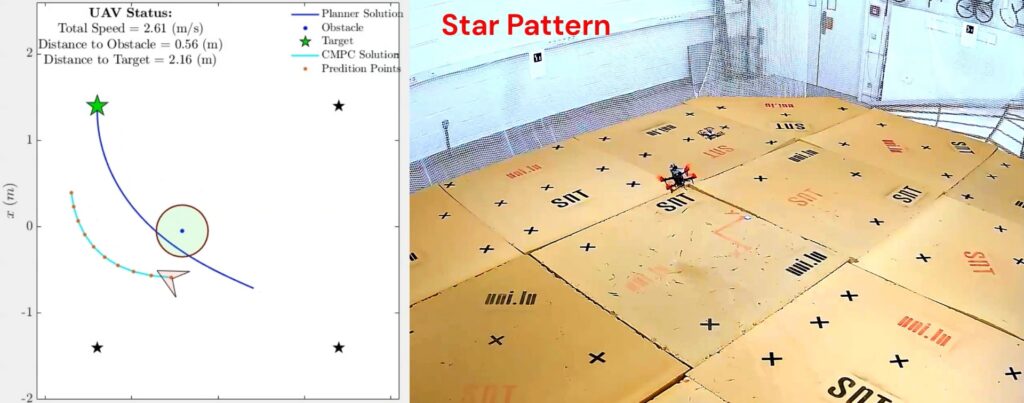
One key area over the past 15 years has been the team’s work on drones equipped with a higher level of autonomy.
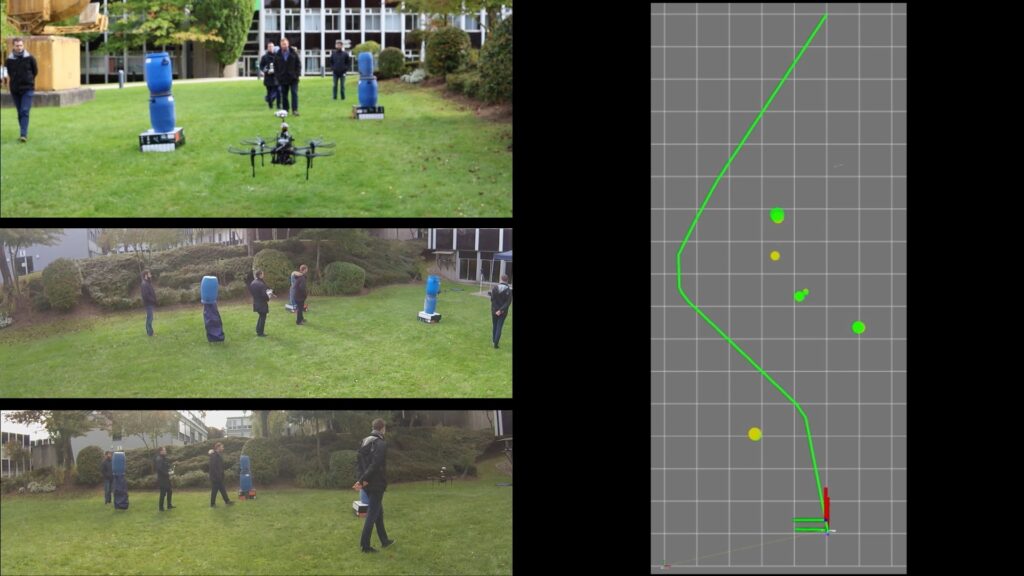
“In this area, we contributed novel planning approaches that allow drones to perform path planning on board in real time, including permanent updates regarding the uncertain situation around. In addition, we worked on advanced and intelligent control approaches to enable drones fly faster and more safely due to guaranteed collision avoidance. We also investigated learning approaches to improve flight control, enabling drones to learn their flight control actions.”
“Finally, we have been working for years on solutions for flying manipulation, in which robotic arms are attached to drones to perform manipulation tasks while flying. Recently, we have also been working on soft grippers and manipulators inspired by nature, such as the arm of an octopus. To validate our results in real flight experiments, we have built an advanced indoor flight arena equipped with a motion capture system over the years. We also conduct outdoor flight experiments, e.g. for tasks such as the visual inspection of aircraft. ”Holger Voos
Enabling robots to build 3D world models
Another area where the team has applied focus in recent years is advanced situational awareness models for mobile robots. The team has for example developed a model that makes it possible for robots to build an internal 3D map of their environment, based on LiDAR or camera measurements – all while moving or flying around in complex scenarios.
Augmented with geometric, semantic, dynamic and topological relationships, the graph-based models also take the uncertainty in sensing into account, Voos explains. An example of application is mobile legged robots that are used to inspect and scan construction sites.

Robotics meets physics
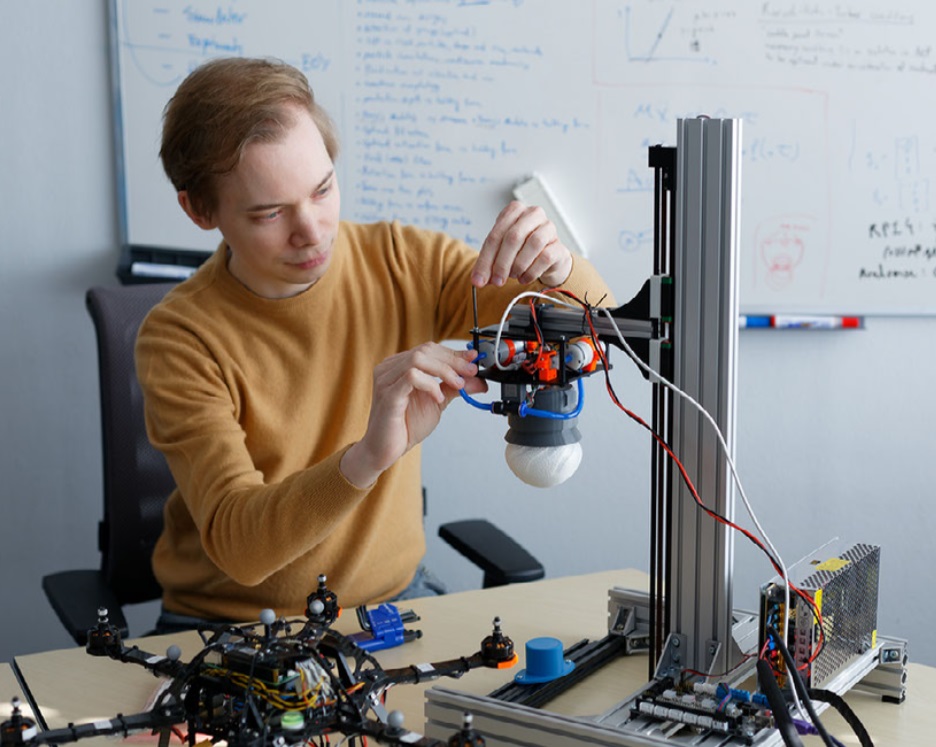
“With the support from FNR grants we have had the opportunity to work on some very unique and highly interdisciplinary projects. For example, in collaboration with Prof. Jan Lagerwall from the Department of Physics at the University of Luxembourg, we are investigating how their innovations in novel materials based on liquid crystals or polymers with special optical properties can be used in robotics.”
This entails working on QR-code like optical markers that are invisible for the human eye, but detectable by robots using the team’s novel sensing approach. The markers in question can include information that help the robots in improving navigation, as well as making it easier to understand what type the marked object is. Aside from this, novel elastic materials are used to improve control thanks to the optical sensing of the deformation of soft robotic grippers.
“In another FNR-funded collaboration with the company The Lunar Grid we are currently investigating drones that are wirelessly powered by a Laser from the ground. Mounting the usually stationary Laser power source on a mobile robot will now enable us to create a tandem of robot and drone that can move around even in challenging environments in a coordinated way. ”Holger Voos
The future of robotics has endless possibilities
Robotics – like many research areas – has and will continue to be hugely influenced by developments in Artificial Intelligence (AI). Recent approaches such as large language models, foundation models, as well as deep and reinforcement learning, are opening the door for autonomous vehicles and robots with incredible capabilities: they will be able to perceive their environments more accurately, learn from experience, as well as adapting their behaviour and acting in a more intelligent way.
“AI will also likely change the way how we communicate with such autonomous systems, as natural language could play a significant role and real conversations with robots will be possible. We can also expect that robotics hardware will further advance. This will include the development of novel soft robots and components for a safer and adaptive physical interaction with the environment. As very sophisticated sensors are currently becoming mass products, also robotic sensing will considerably improve. Finally, special processors that support AI applications might be embedded also in robots.”

“With our research, we intend to contribute to some of these trends and to further increase our impact and visibility in the international robotics research community, and to continue to apply research results with industrial partners. ”Holger Voos
Interdisciplinarity at the core
Robotics is a highly interdisciplinary field of research that requires many scientific disciplines to work together, borrowing from sensor systems and processing, mechanical engineering, materials science, mechatronics, as well as automation and computer science.
“Therefore, as a research group, we must always stay up to date on these different technological developments while also carefully selecting our own dedicated area of research where we can make an impact.”
Voos explains that a challenge for autonomous vehicles and robots is that they need to interact directly with the real world, which often also means with humans. This kind of environment is often unstructured and fraught with uncertainty, which means it places demanding requirements on every capability – such as perception, planning, motion control – and every system property – such as precision, safety, dexterity.
Combining capabilities
“Besides continuing our research in specific single domains such as situational awareness, task and motion planning, or motion control for autonomous vehicles and robots, one main research goal is the tighter integration of all of these three capabilities,” Voos explains when reflecting on the future direction of his group’s research.
The plan is to focus on comprehensive situational awareness models that are based on probabilistic graphical models which directly support planning and motion control. ¨
“Herein, we will apply both model-and optimization-based approaches but also augment those with novel AI methodologies, for instance by learning the situational awareness model or the optimal control actions.”

Artificial intelligence meets biological intelligence
Voos also wants to focus on integrating different aspects of intelligence in the development of robotic solutions. This entails combining artificial intelligence with biological intelligence in the form of making use of recent advancements from neuroscience and cell biology. A step further would be to combine this approach with embodied intelligence. This is based on the idea that true intelligence arises not only from computation, but from the interaction between a body, a brain, and the environment, Voos explains.
“We intend to integrate our recent work in soft robotics in this way. Finally, also social intelligence in robotics might be integrated in this concept, referring to a robot’s ability to understand, interpret, and appropriately respond to human social behaviours, emotions, and norms. As this is clearly a very interdisciplinary approach, we also plan to intensify our collaborations with colleagues from the related disciplines such as AI, neuroscience, soft robotics and social science.”
Holger Voos on training next generation of researchers
“FNR grants are essential to our research. They often enable us to lay the foundation for novel first approaches and results, which serve as the basis for further collaborations with other academic or industrial partners, both nationally or internationally (e.g., in European projects). Overall, 24 PhD students graduated under my main supervision so far, and I am currently the main supervisor of 12 PhD students. In addition, more than 20 PostDocs worked under my supervision while one Research Scientist and 5 further PostDocs currently work in my team. Among my former team members, five became Professor or Ass. Professor (in Luxembourg, Germany, France, or China), one became Lecturer and three became Research Scientists until now. Many of these researchers were involved in FNR-funded projects, and our research and the obtained results helped them pursue further careers in academia or industry. As a supervisor and researcher, I had the opportunity to work with many brilliant young minds and see them develop into independent researchers eager to further advance robotics and automation research.”
On the impact of FNR funding
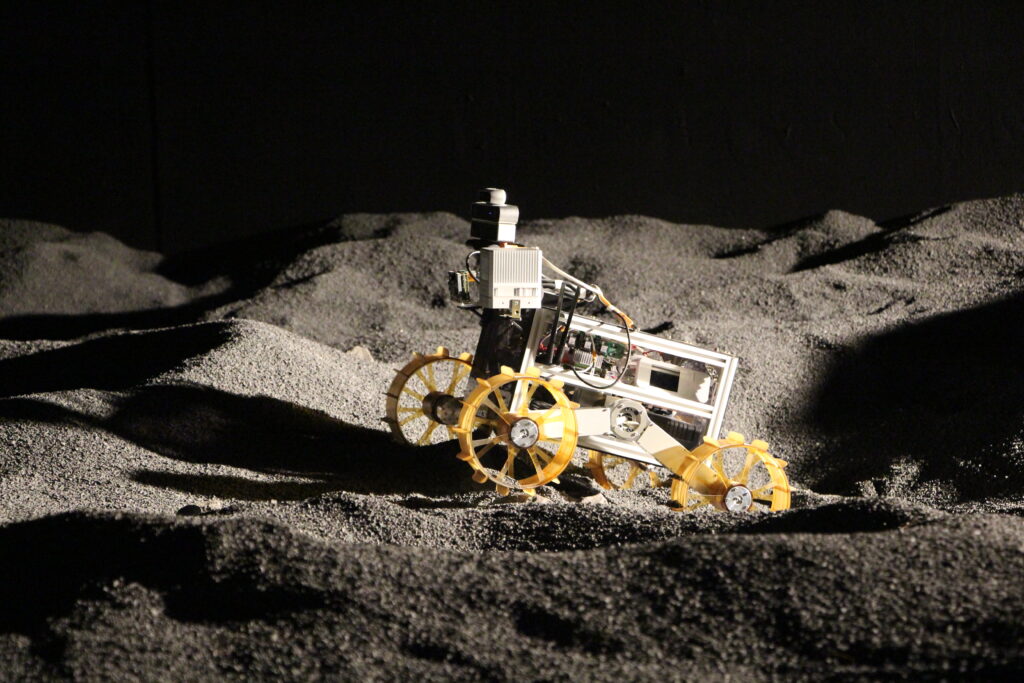
“The impact that FNR funding had on my team and me with respect to collaboration was multifaceted. In programs like CORE, we have often been working on more fundamental problems in interdisciplinary collaborations with colleagues from other disciplines, such as Physics. This reflects the interdisciplinary nature of robotics in general. Grants that foster collaboration between academia and industry, such as the BRIDGES program or the Industrial Fellowships, were extremely helpful in improving and applying theoretical results to real-world problems with economic impact. For example, we collaborated with the company LuxSpace on novel approaches to designing their satellites and controlling satellite formations. With the company iSpace, we developed initial approaches for their moon rover navigation system. The FNR INTER program supported some of our research with international academic institutions such as from France, and the INTER Mobility program allowed me to spend my sabbatical in 2018 at the newly founded Singapore University of Technology and Design (SUTD). This was a highly inspiring experience for me and also led to long lasting contacts to colleagues from Singapore until today. Finally, the FNR RESCOM grant supported the organization of a large international scientific conference in Luxembourg that also increased the visibility of Luxembourg and our university in the robotics and automation community.”
All images by SnT Automation & Robotics Research Group
Holger Voos’ FNR-supported projects (main applicant)
| Project title | Call year | FNR funding instrument |
| Integrating Situational Awareness, Planning and Control for Autonomous Robots using S-Graphs | 2025 | CORE |
| Autonomous Robotic Surveillance System with Laser-Powered Drone | 2024 | DEFENSE BRIDGES |
| Unclonable Invisible Optical Markers For Defence Applications | 2023 | DEFENSE BRIDGES |
| Control of a Soft Aerial Manipulator with CLCE-based Optical Strain Sensing | 2022 | CORE |
| IEEE International Conference on Fuzzy Systems 2021 (FUZZ-IEEE 2021) | 2020 | RESCOM |
| Development Tool for Autonomous Constellation and Formation Control of Microsatellites | 2019 | BRIDGES |
| Engineering Design for Autonomous Mobile Robots | 2017 | INTER Mobility |
| Robust Emergency Sense-and-Avoid Capability for Small Remotely Piloted Aerial Systems | 2015 | CORE |
| Integrated Security and Safety Engineering for Networked Control Systems | 2011 | CORE |
Related highlights
25 examples of research with impact: Driving innovation in software engineering, security, and AI
As the FNR marks 25 years since its creation, we highlight 25 examples of FNR-supported research with impact. Since arriving…
Read more
25 examples of research with impact: The science of fairness – inside inequality
As the FNR marks 25 years since its creation, we highlight 25 examples of FNR-supported research with impact. Since arriving…
Read more
25 examples of research with impact: A solid foundation for artificial intelligence
As the FNR marks 25 years since its creation, we highlight 25 examples of FNR-supported research with impact. Artificial intelligence…
Read more
25 examples of research with impact: Smart materials for a sustainable future
As the FNR marks 25 years since its creation, we highlight 25 examples of FNR-supported research with impact. Since arriving…
Read more
25 examples of research with impact: Advancing AI and Computer Vision: From space tech to better healthcare
As the FNR marks 25 years since its creation, we highlight 25 examples of FNR-supported research with impact. Since arriving…
Read more
25 examples of research with impact: Understanding the evolution of the workplace in the digital era
As the FNR marks 25 years since its creation, we highlight 25 examples of FNR-supported research with impact. Active in…
Read more